If you want to access to a your personal computer from anywhere via
"Windows Remote Desktop Connection" you have to: firstly, configure your
modem. Secondly, you must know your IP. Here I assume that you know how
to configure your modem (if don't please see here)
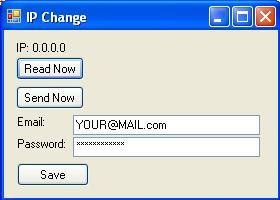
then you should use a program like MailIP to send your computer's IP
automatically to your email even if you have dynamic valid IP. In this
way you save money from not buying static IP because when ever your IP
get changed "MailIP" will send the new IP to your email. Also you don't
need to subscribe to slow services like LogMeIn or TeamViewer and you
can easily use the default windows remote control program.
The source code and binary file can be downloaded here.
The source code and binary file can be downloaded here.
